Wstęp do robotyki - podwozie robota JurBot
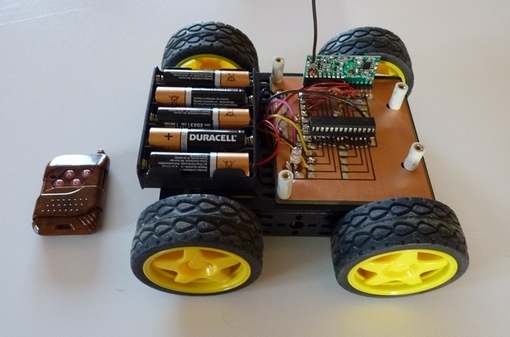
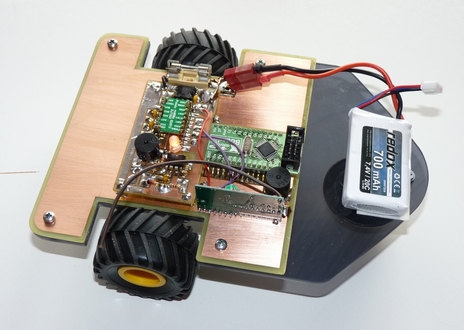
Mikroprocesory znakomicie nadają się do układów sterujących robotami. W tym dziale przedstawię moje działania projektowe i konstrukcyjne przy tworzeniu robota. Efektem końcowym będzie układ elektroniczno-mechaniczny, który przemieszczając się po mieszkaniu będzie omijał przeszkody, reagował na świało, dźwięk oraz reagował na nieprzewidziane zdarzenia wygłąszając odpowiednie komunikaty dźwiękowe. Układ jezdny składa się z czterech kół, każde napędzane osobnym silnikiem. Na tym etapie zaprogramowałem i wykonałem układ sterujący tymi silnikami, realizujący komendy: naprzód, wstecz, lewo przód, prawo przód, lewo tył, prawo tył, obrót lewo, obrót prawo. Testuję układy sterujące silnikami. JurBot jest sterowany z czterokanałowego pilota radiowego, który przekazuje sygnały sterujące pracą kół. Jest możliwość zmiany prądkości obrotowej, momentu obrotowego, za pomocą zmiany wypełnienia przemiennego sygnału prostokątnego, modulacja PWM.
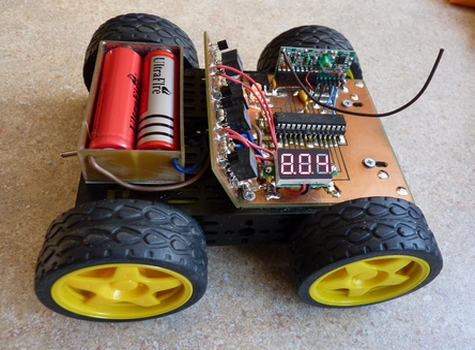

A to ta sama platforma 4-kołowa, zasilana przy pomocy akumulatorów LiJon typu 18650, z napędem w postaci czterech silników prądu stałego z przekładnią 48:1. Duża powierzchnia z otworami umożliwia montaż różnorodnych czujników (np. do pomiaru odległości), modułów oraz elementów wykonawczych (np. robotycznego ramienia). Zestaw jest sterowany przy pomocy Atmega8 z mostkowym sterownikiem silników. Instrukcję montażu oraz specyfikację silników można pobrać w postaci plików pdf. Zasilanie układu ułatwia zamontowany koszyk z wyprowadzonymi przewodami.


TB6612FNG - dwukanałowy sterownik silników - moduł Pololu
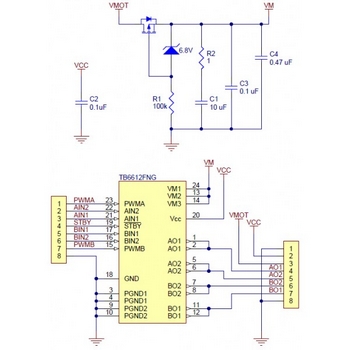
Moduł Pololu z dwukanałowym sterownikiem silników prądu stałego. Zasilany jest napięciem od 4,5 do 13,5 V. Ciągły prąd na kanał to 1A, przy połączeniu obu kanałów wartość wzrasta do 2A. Mostek H-TB6612FNG jest wydajnym sterownikiem silników w małej obudowie SSOP24. Firma Pololu wyszła naprzeciw oczekiwaniom użytkowników i stworzyła moduł zawierający układ TB6612FNG oraz potrzebne do jego poprawnego działania komponenty pasywne.

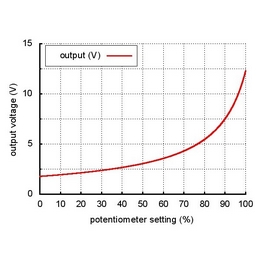
Przetwornica S7V8F3 to impulsowy regulator napięcia typu step-up/step-down (buck-boost). Konwertuje napięcie wejściowe 2,7V - 11,8V na wartość wyjściową 5V ze średnią sprawnością 80%. Napięcie wejściowe może być niższe, wyższe lub równe wartości wejściowej, co czyni układ funkcjonalnym i uniwersalnym. Elastyczność napięć wejściowych sprawia, że układ doskonale spisuje się w systemach zasilanych bateryjnie, gdzie wymagana jest stabilność napięcia zasilania oraz jego niezależność od poziomu naładowania akumulatora.




Układ zabezpieczający
Dzwonek
Jest to układ do ochrony nadnapięciowej i przeciwwyłączeniowej urządzeń podłączonych do niestabilnej sieci elektroenergetycznej. W układzie mierzone jest napięcie w sieci 230V. Jeśli napięcie sieciowe spada poniżej 180V to układ wyłącza zasilane urządzenie i załącza je z opóźnienim 20 sekund dopiero wtedy gdy napięcie zasilające przyjmie wartość z zakresu od 200V do 255V. Jeśli napięcie sieciowe wzrasta powyżej 255V to układ wyłącza zasilane urządzenie i włącza je z opóźnienim 20 sekund dopiero wtedy gdy napięcie zasilania przyjmie wartość z zakresu od 200V do 255V. Elementem załaczającym jest przekaźnik półprzewodnikowy, który ma tę zaletę, że załącza i wyłącza urządzenia w zerze i reaguje z ogromną szybkością w porównaniu z przekaźnikiem elektromagnetycznym. Całością zarządza odpowiednio zaprogramowany procesor Atmega8. Wykonałem cztery takie układy, które ochraniają zasilanie moich urządzeń elektronicznych, urządzeń RTV, automatycznego pieca węglowego i urządzeń AGD.
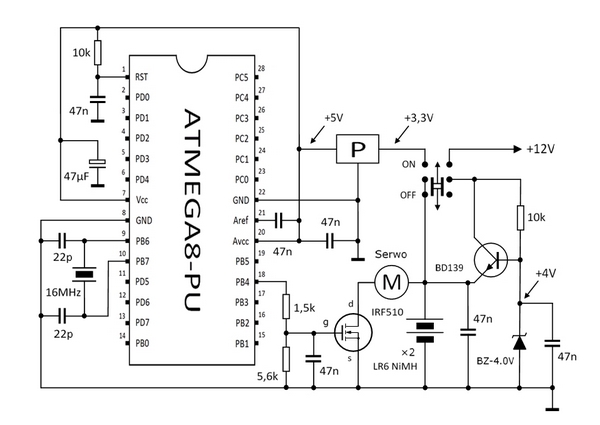
Dzwony, dzwonki, dzwoneczki, chyba wszyscy lubimy ich dźwięki. Słyszymy je podczas uroczystości religijnych, w zwiedzanych zabytkowych kościołach i klasztorach, przypominają nam dalekie podróże, spacery uliczkami śródziemnomorskich miast. Towarzyszą nam w podróży statkiem lub jachtem wyznaczając swym dźwiękiem rytm codziennej pracy załogi. Postanowiłem zrobić taki dzwoneczek, który w ciągu dnia daje swym uroczym dźwiękiem sygnał o każdej godzinie. Zrobiłem obudowę z klejonych kształtowników aluminiowych, do której umocowałem mosiężną czaszę dzwonka. Dźwięki wydawane są przez uderzenia kulistej śruby przykręconej do sprężystej blachy. Blacha szarpana jest przez dźwignię serwomechanizmu, która wykonuje ruch obrotowy z prędkością kątową 1 obrótu na dwie sekundy. Mechanizm obrotowy sterowany jest przez oprogramowany układ mikroprocesora Atmega8 ze stabilnym generatorem kwarcowym o częstotliwości 16 MHz. Dźwięki dzwonka tworzą miły nastrój i słyszane są w dość dużej odległości zadziwiając okolicznych sąsiadów.
Układ elektroniczny zasilany jest z dwóch akumulatorów LR6, które zapewniają poprawne odmierzanie czasu w przypadku zaniku napięcia sieciowego 230W. Akumulatory doładowywane są przez stałoprądowy zasilacz buforowy zasilany napięciem 12V z zasilacza wtyczkowego o prądzie 100mA. Ze względu na niestabilne napięcie na akumulatorach zastosowałem przetwornicę DC/UP, która daje niezmienne napięcie 5V do zasilania mikroprocesora.
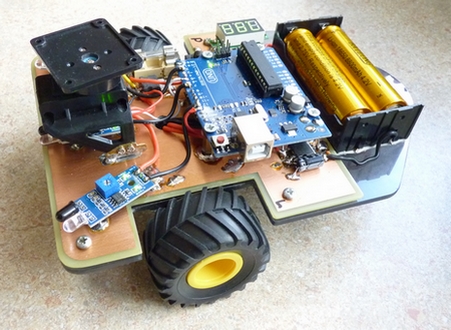
Drugi model robota z czujnikami przeszkód. Potrafi samoczynnie omijać przeszkody. Identyfikacją przeszkód zajmują się czujniki odległości na podczerwień. Napęd na dwa koła umożliwia skręt w miejscu lub obrót w miejscu. Trzecie koło jest kulką podpierającą. Oprogramowanie pozwala na samoczynne porusznie się i omijanie przeszkód. Po lewej stronie układ jezdny bez czujników z procesorem Atmega8. Po prawej w pełni funkcjonalny robot z układem jezdnym sterowanym modułem Arduino Uno z czujnikami przeszkód na podczerwień.





Jurek SQ7JHM
Model pojazdu sterowanego radiem
Model robota z czujnikami przeszkód
SQ7JHM



